Pyramid Cameras
To acquire panoramic video sequences, we have developed two types of Double-Mirror-Pyramid cameras that capture up to 360-degree fields of view at high-resolution. The first one, A Single View Double-Mirror-Pyramid Panoramic Camera, acquires a single sequence from one viewpoint, whereas the second, A Multiview Double-Mirror-Pyramid Panoramic Camera, provides multiple video sequences each taken from a different viewpoint, e.g. stereo sequences for 3D viewing. Both of these cameras belong to the family of pyramid cameras.
MULTI-VIEW DOUBLE MIRROR PYRAMID PANORAMIC CAMERAS
Panoramic images and video are useful in many applications such as special effects, immersive virtual reality environments, and video games. Among the numerous devices proposed for capturing panoramas, mirror pyramid-based camera systems are a promising approach for video rate capture, as they offer single-viewpoint imaging, and use only flat mirrors that are easier to produce than curved mirrors. Past work has focused on capturing panoramas from a single viewpoint. In this work, we have extended our work on the Double Mirror Pyramid Panoramic Camera, that acquires panoramic images from a single viewpoint, to multiple viewpoints.
Mirror Pyramid Cameras
A mirror pyramid consists of a set of flat mirror faces arranged around an axis of symmetry, inclined to form a pyramid. By strategically positioning a number of conventional cameras around a mirror pyramid, the viewpoints for the individual cameras? mirror images can be colocated at a single point within the pyramid, effectively forming a virtual camera with a wide field of view. Mirror pyramid-based panoramic cameras have a number of attractive properties, including
- single-viewpoint imaging
- high resolution
- video rate capture
Currently existing designs realize a single viewpoint within each mirror pyramid. In order to capture panoramas from multiple viewpoints with these designs, the entire physical setup would need to be relocated or duplicated. The former solution lacks the capability of video rate imaging, and the latter leads to bulky designs due to the multiple mirror pyramids.
Multiview Double Mirror Pyramid Cameras
We have extended mirror pyramid panoramic camera to a generalized design that accommodates multiple viewpoints. Each viewpoint is the common mirror image of the optic points of a set of physical cameras located outside the pyramid and together they yield a seamless panoramic image. Each camera set yields a panoramic image from its associated viewpoint. The result is simultaneous, multiview, panoramic, video rate imaging with a compact design. Using a double mirror pyramid, i.e., two pyramids back to back with a shared base, helps double the height of the visual field in a manner similar to monocular imaging in our Double Mirror Pyramid Panoramic Camera. The resulting set of panoramic images can be used for stereo analysis or stereo viewing.
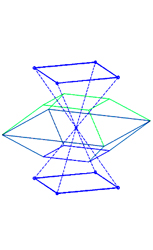

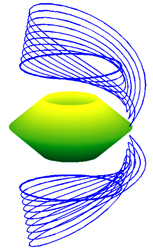
Figure 1. Variation in the physical camera position with viewpoint position. (a) Viewpoint is centered within four-sided pyramid, shown with the corresponding eight camera positions. (b) Translated viewpoints marked A, B, and C are shown with correspondingly marked physical camera positions. (c) Same as (b), but for a mirror pyramid having a large number of faces, to show how the shape changes as the viewpoint translates.
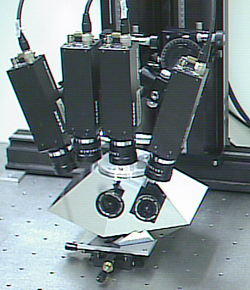
Prototype
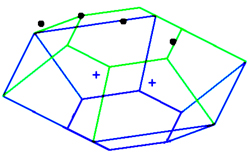
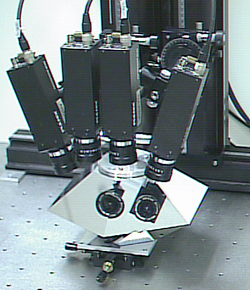
Figure 2. The experimental two-view panoramic camera shown with only four sensors. (a) A schematic showing double mirror pyramid with the four physical cameras associated with two faces, two per face each corresponding to one of the two viewpoints. (b) The physical implementation with four sensors (conventional cameras) whose reflections can be seen inside the two associated mirror faces.
Results





Figure 3. (a) The four images captured by the four sensors (conventional cameras). (b) The mosaic of four images. These mosaic will be 360-degree wide when all physical cameras are present instead of just the four used here.
- K.-H. Tan, H. Hua and N. Ahuja, Multiview Panoramic Cameras Using Mirror Pyramids, IEEE Transactions on Pattern Analysis and Machine Intelligence, Vol. 26, No. 7, July 2004, 941-946.