Locomotive and rolling stock condition is an important element of railway safety, reliability, and service quality. Traditionally, railroads have monitored equipment condition by conducting regular inspections. Over the past several decades, certain inspection tasks have been automated using technologies that have reduced the cost and increased the effectiveness of the inspection. However, the inspection of most aspects of railroad equipment undercarriages is conducted manually. This is a labor-intensive process and often requires that railroad equipment be taken out of service so that the inspection can be conducted on specially equipped pit tracks. Machine vision technology offers the potential to quickly and automatically monitor, assess, record, and transmit detailed information regarding the condition of railroad equipment undercarriages and components. Multi-spectral imaging (e.g. visible and infrared range) allows recording of both physical and thermal condition and correlation between the two. This allows precise comparison of any undercarriage component or element of interest using templates, and/or references to previously recorded inspections, of the same or similar equipment and enables other analyses such as trending of component wear and detection of progressive increases in component heating over time. Multi-spectrum machine vision algorithms can determine if a component is outside its normal operating range and if anomalies are correlated across different spectra. The inspection tasks of particular interest for this investigation include disc brake condition, bearing performance, and detection of incipient failure of electrical systems such as locomotive traction motors and air conditioning units. We are also investigating detection of damaged or missing components and foreign objects.
Results
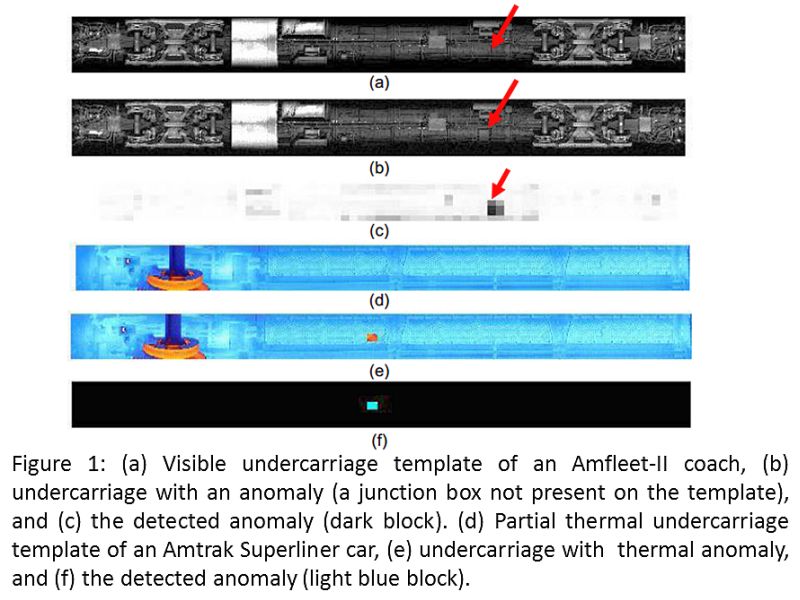
A relatively coarse-level analysis could be used for detection of foreign or missing components by comparing the railcar panorama to a car-level template. Car-specific visible and thermal templates were created and stored for each piece of equipment to allow for unique configurations due to repairs and other modifications. To detect anomalies, block-level correlation was performed between the recorded panorama (Figure 1b) and the railcar’s template (Figure 1a). An example of anomaly detection is illustrated by the junction box present in the panorama for the car but not in the template. Areas of mismatch have a low correlation and the junction box is clearly evident (dark area in Figure 1c). Detection of thermal anomalies is computed in a similar manner using differences in color values between the thermal panorama and the car’s thermal template (Figures 1d – 1f).
- J. M. Hart, E. Resendiz, B. Freid, S. Sawadisavi, C. P. L. Barkan and N. Ahuja, “Machine Vision Using Multi-Spectral Imaging for Undercarriage Inspection of Railroad Equipment,” Proc. 8th World Congress on Railway Research (WCRR), Seoul, Korea, May 2008.